Read more
On the website www.sustainablesafety.nl you will find an overview of all SWOV publications concerning Sustainable Safety.
SWOV (2018). DV3- Duurzaam Veilig Wegverkeer 2018-2030. Principes voor ontwerp en organisatie van een slachtoffervrij verkeerssysteem. SWOV, Den Haag.
Van Schagen, I. & Aarts, L. (2018). DV3 – Huidige situatie, maatschappelijke trends en wensbeelden. Kader voor de visie Duurzaam Veilig Wegverkeer 2018-2030. R-2018-6A. SWOV, Den Haag.
Aarts, L. & Dijkstra, A. (2018). DV3 – Achtergronden en uitwerking van de verkeersveiligheidsvisie. De visie Duurzaam Veilig Wegverkeer voor de periode 2018-2030 onderbouwd. R-2018-6B. SWOV, Den Haag
Sources used in this publication
Below, you will find a list of references used in this fact sheet. All sources used may be accessed via our library portal where more literature on this subject may also be found.
[1]. Buchanan, C. (1963). Traffic in towns: A study of the long term problems of traffic in urban areas. Reports of the Steering Group and Working Group appointed by the Minister of Transport. Her Majesty's Stationery Office, London, UK.
[2]. Janssen, S.T.M.C. (1974). Verkeersveiligheid als criterium voor het wegontwerp. In: Congresdag 1974. Wegontwerp en wegverlichting tegen de achtergrond van de verkeersveiligheid. 6 december 1974, Utrecht, p. p. 13-40.
[3]. Swedish National Board of Urban Planning (1968). Principles for urban planning with respect to road safety: the Scaft Guidelines 1968. Statens Planwerk Publication no. 5. Swedish National Board of Urban Planning, Stockholm.
[4]. Koornstra, M.J., Mathijssen, M.P.M., Mulder, J.A.G., Roszbach, R., et al. (1992). Naar een duurzaam veilig wegverkeer. Nationale Verkeersveiligheidsverkenning voor de jaren 1990/2010. SWOV, Leidschendam.
[5]. Delbressine, R.R.H.L. (2013). The traffic safety of bicycle streets in the Netherlands. Master Thesis Delft University of Technology. Delft.
[6]. Aarts, L. & Dijkstra, A. (2018). DV3 – Achtergronden en uitwerking van de verkeersveiligheidsvisie. De visie Duurzaam Veilig Wegverkeer voor de periode 2018-2030 onderbouwd. R-2018-6B. SWOV, Den Haag.
[7]. Tingvall, C. & Haworth, N. (1999). Vision Zero: An ethical approach to safety and mobility. In: Proceedings of the 6th ITE International Conference Road Safety & Traffic Enforcement: Beyond 2000. Melbourne, 6-7 September 1999.
[8]. Rosén, E., Stigson, H. & Sander, U. (2011). Literature review of pedestrian fatality risk as a function of car impact speed. In: Accident Analysis & Prevention, vol. 43, nr. 1, p. 25-33.
[9]. Davidse, R.J., Duijvenvoorde, K. van, Boele, M.J., Doumen, M.J.A., et al. (2014). Letselongevallen van fietsende 50-plussers; Hoe ontstaan ze en wat kunnen we eraan doen? R-2014-3. SWOV, Den Haag.
[10]. Ormel, W., Klein Wolt, K. & Hertog, P. den (2009). Enkelvoudige fietsongevallen; Een LIS-vervolgonderzoek. Directoraat-Generaal Rijkswaterstaat, Dienst Verkeer en Scheepvaart DVS, Delft.
[11]. Schepers, P. (2013). A safer road environment for cyclists. Doctoral thesis Technische Universiteit Delft TUD, SWOV-Dissertatiereeks, SWOV, Leidschendam.
[12]. Wijlhuizen, G.J., Petegem, J.W.H. van, Goldenbeld, C., Gent, P. van, et al. (2016). Doorontwikkeling CycleRAP-instrument voor veiligheidsbeoordeling fietsinfrastructuur. R-2016-11. SWOV, Den Haag.
[13]. Ministerie van VenW (1985). Van woonerf naar erf: voorstelling voor aanpassing van de woonerfwetgeving. Eindrapport van de Werkgroep Erven in het kader van maatregel 333-3 van het Nationaal Plan voor de Verkeersveiligheid NVP. Directie verkeersveiligheid, Ministerie van Verkeer en Waterstaat, Den Haag.
[14]. Aarts, L.T. & Nes, N. van (2007). Een helpende hand bij snelhedenbeleid gericht op veiligheid en geloofwaardigheid. Eerste aanzet voor een beslissingsondersteunend instrument voor veilige snelheden en geloofwaardige snelheidslimieten. D-2007-2. SWOV, Leidschendam.
[15]. Vlakveld, W.P., Boele, M.J., Aarts, L.T. & Schermers, G. (2013). Natuurlijk Sturen in Limburg. Een kijkgedrag- en snelheidsonderzoek en een verkeerskundige analyse van twee aangepaste wegen. R-2013-2. SWOV, Leidschendam.
[16]. Aarts, L.T., Davidse, R.J. & Christoph, M. (2007). >Herkenbaar wegontwerp en rijgedrag. Een rijsimulatorstudie naar herkenbaarheid van gebiedsontsluitingswegen buiten de bebouwde kom. R-2006-17. SWOV, Leidschendam.
[17]. Theeuwes, J. (1991). Visual search of traffic scenes. Report IZF 1991 C-18. TNO Technische Menskunde, Soesterberg.
[18]. Wildervanck, C. (2008). 10 gouden regels om rekening te houden met de weggebruiker. Directoraat-Generaal Rijkswaterstaat, Dienst Verkeer & Scheepvaart DVS, Delft.
[19]. Kroon, E.C.M., Martens, M.H., Brookhuis, K.A., Hagenzieker, M.P., et al. (2016). Human factor guidelines for the design of safe in-car traffic information services. Smart mobility round table human behaviour. DITCM, Helmond.
[20]. PIARC (2015). Road safety manual: a guide for practitioners. World Road Association PIARC, Parijs.
[21]. Alexander, G.J. & Lunenfeld, H. (1986). Driver expectancy in highway design and traffic operations: final report. FHWA-TO-86-1. Department of Transportation DOT, Federal Highway Administration FHWA, Office of Traffic Operations, Washington D.C.
[22]. Goldenbeld, C., Groot-Mesken, J. de & Temürhan, M. (2017). Nudging van rijsnelheid via Dick Bruna-borden: een veldexperiment. De effecten op werkelijk gereden snelheden in vijf gemeenten onderzocht. R-2017-11. SWOV, Den Haag.
[23]. Asmussen, E. (1996). De nieuwe normmens: mens ... maat der dingen: op weg naar integrale veiligheid en toegankelijkheid voor iedereen. Provinciaal Overleg Verkeersveiligheid POV, Zuid Holland, Den Haag.
[24]. Davidse, R.J. (2003). Ouderen en ITS: samen sterk(er)? Literatuurstudie naar de toegevoegde waarde van Intelligente Transportsystemen voor de veiligheid van de oudere automobilist. R-2003-30. SWOV, Leidschendam.
[25]. Michon, J.A. (1989). Modellen van bestuurdersgedrag. In: Van Knippenberg, C.W.F., Rothengatter, J.R. & Michon, J.A. (ed.), Handboek sociale verkeerskunde. Van Gorcum, Assen, p. 207- 231.
[26]. Davidse, R.J., Vlakveld, W.P., Doumen, M.J.A. & Craen, S. de (2010). Statusonderkenning, risico-onderkenning en kalibratie bij verkeersdeelnemers. Een literatuurstudie. R-2010-2. SWOV, Leidschendam.
[27]. Bliss, T. & Breen, J. (2009). Implementing the recommendations of the World report on road traffic injury prevention: country guidelines for the conduct of road safety management capacity reviews and the specification of lead agency reforms, investment strategies and safe system projects. World Bank Global Road Safety Facility, Washington.
[28]. United Nations Road Safety Collaboration (2010). Global plan for the decade of action for road safety 2011-2020. World Health Organisation WHO, Genève.
[29]. Ekman, L. (2017). Vision Zero. Contribution to the European Road Safety Summer School, August 28 - September 1, 2017, Mechelen.
[30]. OECD/ITF (2016). Zero road deaths and serious injuries: leading a paradigm shift to a safe system. Organisation for Economic Co-operation and Development OECD / International Transport Forum ITF, Paris.
[31]. OECD/ITF (2008). Towards zero: ambitious road safety targets and the safe system approach. Organisation for Economic Co-operation and Development OECD/International Transport Forum ITF, Paris.
[32]. Twisk, D.A.M. (2019). Verkeersveiligheid, wiens verantwoordelijkheid is het eigenlijk? Over patriarchale overheden en eigenzinnige burgers. R-2019-31. SWOV, Den Haag.
[33]. Brundtland commision (1987). Our common future: report of the World Commission on Environment and Development. World Commission on Environment and Development, United Nations, Oslo.
[34]. Berg, Y., Strandroth, J. & Lekander, T. (2009). Monitoring performance indicators in order to reach Sweden’s new road safety target – a progress towards zero. Contribution to the 4th IRTAD conference, 16-17 September 2009, Seoul, Korea
[35]. Berg, Y. (2013). Analysis of road safety trends 2012. Management by objectives for road safety work, towards the 2020 interim targets. Publication 2013:178. Swedish Transport Administration, Trafikverket, Borlänge.
[36]. WRR (2017). Weten is nog geen doen. Een realistisch perspectief op redzaamheid. Wetenschappelijke Raad voor het Regeringsbeleid WRR, Den Haag.
[37]. WRR (2014). Met kennis van gedrag beleid maken. Wetenschappelijke Raad voor het Regeringsbeleid WRR, Den Haag.
[38]. Deming, W.E. (1986). Out of the crisis. MIT Center for Advanced Engineering Study, Cambridge.
[39]. ANWB, RAI Vereniging, TLN, NS, et al. (2017). Vooruit! Slimmer, flexibel, groen en veilig. Mobiliteitsalliantie.
[40]. ANWB, AON, Immers, B., Bosch, J.W., et al. (2017). Verkeersveiligheid: een nationale prioriteit; Kiezen voor meer veiligheid en minder slachtoffers. ANWB, Den Haag.
[41]. Wee, B. van & Marchau, V. (2005). De veranderende context voor Duurzaam Veilig. Suggesties voor de beoordeling van maatregelen en het proces. In: Wegman, F. & Aarts, L. (red.), Denkend over Duurzaam Veilig. Essaybundel. SWOV, Leidschendam, p. 136-143.
[42]. Davidse, R.J. (2012). Diepteonderzoek naar de invloedsfactoren van verkeersongevallen. Samenvatting en evaluatie van de resultaten van de pilotstudie diepteonderzoek 2008-2011. R-2012-19. SWOV, Leidschendam.
[43]. Reurings, M.C.B. & Bos, N.M. (2009). Ernstig gewonde verkeersslachtoffers in Nederland in 1993-2008; Het werkelijke aantal in ziekenhuizen opgenomen verkeersslachtoffers met een MAIS van ten minste 2. R-2009-12. SWOV, Leidschendam.
[44]. Tarko, A., Davis, G., Saunier, N., Sayed, T., et al. (2009). Surrogate measures of safety. White paper. Transportation Research Board TRB, Committee on Safety Data Evaluation and Analysis, Subcommittee on Surrogate Measures of Safety, Washington, D.C.
[45]. Aarts, L.T., Loenis, B.J.C., Dijkstra, A., Deden, N.Y., et al. (2016). Risicofactoren nader onderzocht: 50 km/uur-kruispunten. Het concept van Safety Performance Indicators (SPI’s) nader belicht, risicofactoren bij dodelijke ongevallen en kwantificering van roodlichtnegatie. R-2016-17. SWOV, Den Haag.
[46]. Rumar, K. (1999). Transport safety visions, targets and strategies: beyond 2000. Contribution to the 1st European Transport Safety Lecture, Brussel.
[47]. Aarts, L. (2011). Methoden en instrumenten voor het onderbouwen van verkeersveiligheidsbeleid. Een inventarisatie. R-2011-3. SWOV, Leidschendam.
[48]. Heijkamp, A.H. (2001). Duurzaam Veilig: 5 jaar gedemonstreerd. Directoraat-Generaal Rijkswaterstaat, Adviesdienst Verkeer en Vervoer AVV, Rotterdam.
[49]. Terlouw, J.C., Doef, J.C.T. van der, Leemhuis-Stout, J.M., Koning, B.N. de, et al. (2001). Verkeersveiligheid in gedecentraliseerde banen: investeren in cultuur en structuur. Eindrapport. Bevindingen en advies van de visitatiecommissie (commissie Terlouw) naar aanleiding van COVER, de evaluatie van drie convenanten verkeer en vervoer. In opdracht van Directoraat-Generaal Rijkswaterstaat, Adviesdienst Verkeer en Vervoer AVV, in opdracht van Het Nationaal Verkeers- en Vervoersberaad (NVVB). Directoraat-Generaal Rijkswaterstaat, Adviesdienst Verkeer en Vervoer, AVV, Rotterdam.
[50]. Ministerie van VenW, IPO, VNG & UvW (1997). Convenant over het Startprogramma Duurzaam Veilig. Den Haag.
[51]. Ministerie van VenW (2004). Nota Mobiliteit. Deel I: Naar een betrouwbare en voorspelbare bereikbaarheid. Ministerie van Verkeer en Waterstaat, Den Haag.
[52]. Wegman, F. & Aarts, L. (2006). Advancing Sustainable Safety; National Road Safety Outlook for 2005-2020.. SWOV, Leidschendam.
[53]. SWOV (2018). Sustainable Safety 3rd edition – The advanced vision for 2018-2030. Principles for design and organization of a casualty-free road traffic system.. SWOV, Den Haag.
[54]. Ministerie van IenW, Ministerie van JenV, IPO, VNG, et al. (2018). Veilig van deur tot deur. Het Strategisch Plan Verkeersveiligheid 2030: Een gezamenlijke visie op aanpak verkeersveiligheidsbeleid. Ministerie van IenW, het Ministerie van JenV, het Interprovinciaal overleg, de Vereniging van Nederlandse Gemeenten, de Vervoerregio Amsterdam en de Metropoolregio Roterdam Den Haag, Den Haag.
[55]. Weijermars, W. & Wegman, F. (2011). Ten years of sustainable safety in The Netherlands: An assessment. In: Transportation Research Record vol. No. 2213, p. 1-8.
[56]. Weijermars, W.A.M. & Schagen, I.N.L.G. van (2009). Tien jaar Duurzaam Veilig. Verkeersveiligheidsbalans 1998-2007. R-2009-14. SWOV, Leidschendam.
[57]. Janssen, S.T.M.C. (red. 1997). Functionele eisen voor de categorisering van wegen. Eerste stap naar een handleiding voor duurzaam-veilige wegcategorieën. R-97-34. SWOV, Leidschendam.
[58]. Vissers, J.A.M.M., Nägele, R.C., Kooistra, A.B., Betuw, A.J.M. van, et al. (2005). Leerdoelendocument Permanente Verkeerseducatie. In opdracht van Directoraat-Generaal Rijkswaterstaat, Adviesdienst Verkeer en Vervoer AVV. Traffic Test, Veenendaal.
[59]. Goldenbeld, C., Popkema, M. & Wildervanck, C. (2008). Verkeershandhaving. In: Handboek verkeersveiligheid, Publicatie No. 261. CROW, Ede, p. 343-382.
[60]. Weijermars, W.A.M. & Aarts, L.T. (2010). Duurzaam Veilig van theorie naar praktijk. Verkenning van barrières bij de implementatie van Duurzaam Veilig. R-2010-23. SWOV, Leidschendam.
[61]. Wegman, F.C.M. (2010). De prijs van water bij de wijn. Intreerede 27 januari 2010 ter gelegenheid van de aanvaarding van het ambt van hoogleraar Verkeersveiligheid aan de faculteit Civiele Techniek en Geowetenschappen van de Technische Universiteit te Delft. TU Delft, Faculteit Civiele Techniek en Geowetenschappen, Delft.
[62]. Vägverket (2009). Management by objectives for road safety work. Analysis of the road safety development. Result Conference 2009. Publikation 2009:113. Swedish Road Administration (Vägverket), Göteborg.
[63]. Hughes, B.P., Anund, A. & Falkmer, T. (2015). System theory and safety models in Swedish, UK, Dutch and Australian road safety strategies. In: Accident Analysis & Prevention, vol. 74, p. 271-278.
[64]. Bax, C.A., Aarts, L.T. & Meilink, R. (2014). Veranderde risico-acceptatie in verkeersveiligheid: een praktische uitwerking in ProMeV. Contribution to the Colloquium Vervoersplanologisch Speurwerk, 20 en 21 November 2014, Eindhoven.
[65]. Reijnen, L.H. (2017). Kader verkeersveiligheid: kader voor het borgen van verkeersveiligheid bij aanleg- en onderhoudsprojecten op het Rijkswegennet. Deel A: hoofddocument + Deel B: methodieken en achtergrondinformatie. Ministerie van Infrastructuur en Milieu, Rijkswaterstaat, Water Verkeer en Leefomgeving, Delft.
[66]. IPO (2014). ProMeV: proactief meten verkeersveiligheid. Interprovinciaal Overleg IPO Den Haag.
[67]. Gemeente Amsterdam (2016). Meerjarenplan verkeersveiligheid 2016-2021. Gemeenteraad, Verkeer en Openbare Ruimte, Amsterdam.
[68]. ETSC (2001). Transport safety performance indicators. European Transport Safety Council ETSC, Brussel.
[69]. Aarts, L.T. (2018). Prestatie-indicatoren voor verkeersveiligheid (SPI’s). Een overzicht van de kennis op dit moment over SPI’s als basis voor risicogestuurd beleid. R-2018-19. SWOV, Den Haag.
[70]. Aarts, L.T. (2016). Risicogestuurd verkeersveiligheidsbeleid. Wat is het en wat kun je ermee? Contribution to the Nationaal Verkeersveiligheidscongres NVVC 2016, 21 april 2016, Den Bosch.
[71]. Lindberg, J., Darin, L. & Berg, Y. (2012). Review of interim targets and indicators for road safety in 2010–2020: Analytic report. Publication 2012:162. Swedish Transport Administration (Trafikverket), Borlänge.
[72]. Monderman, H. (2004). Weg van het landschap; Wegen voor mensen. Programmabureau Weg van het landschap, Groningen.
[73]. Hamilton-Baillie, B. (2008). Shared Space. Final evaluation and results. Keuninginstituut, Provincie Friesland, Leeuwarden.
[74]. CROW (2011). Duurzaam Veilig en Shared Space: een vergelijking. CROW, Ede

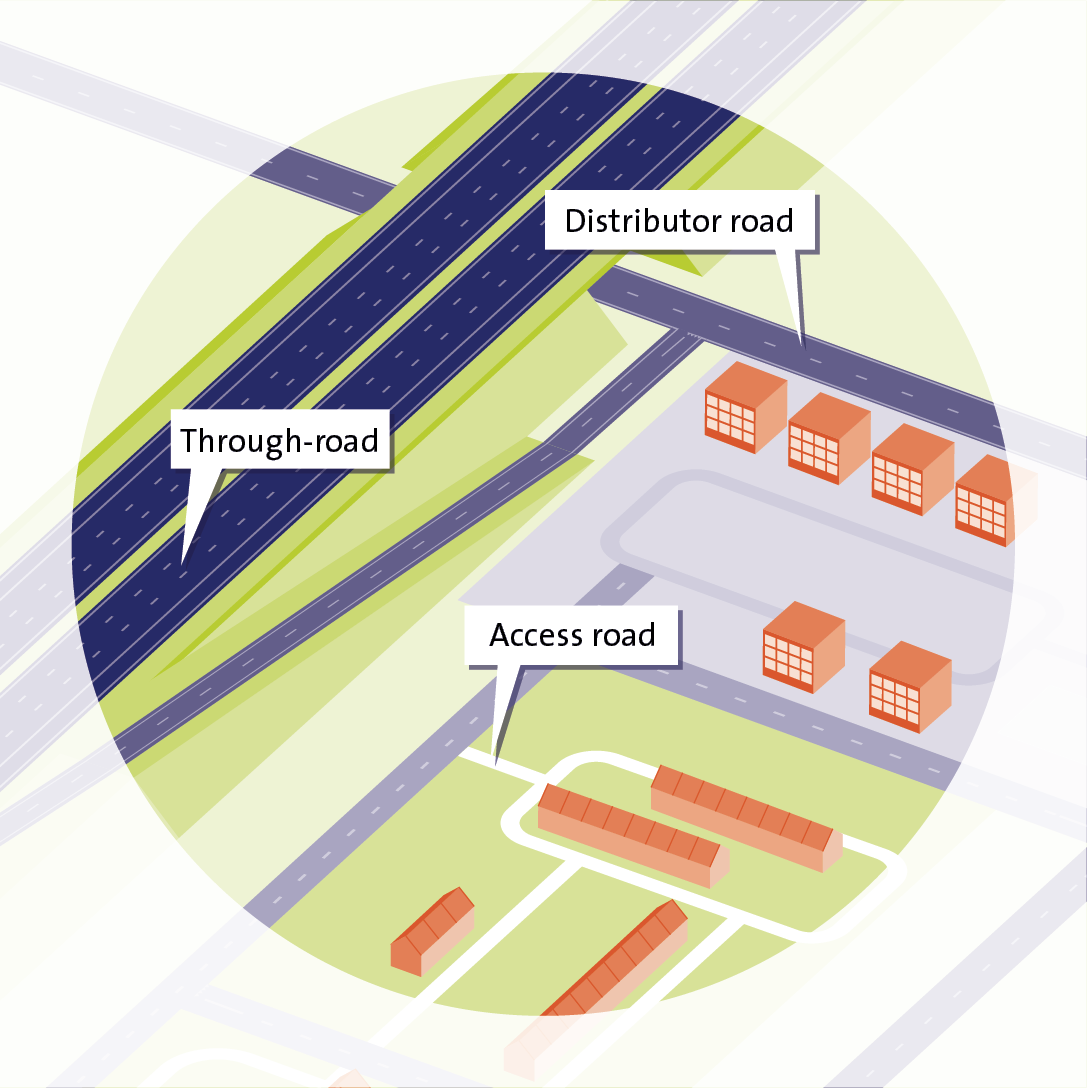 Figure 1. Functional classification of roads.
Figure 1. Functional classification of roads.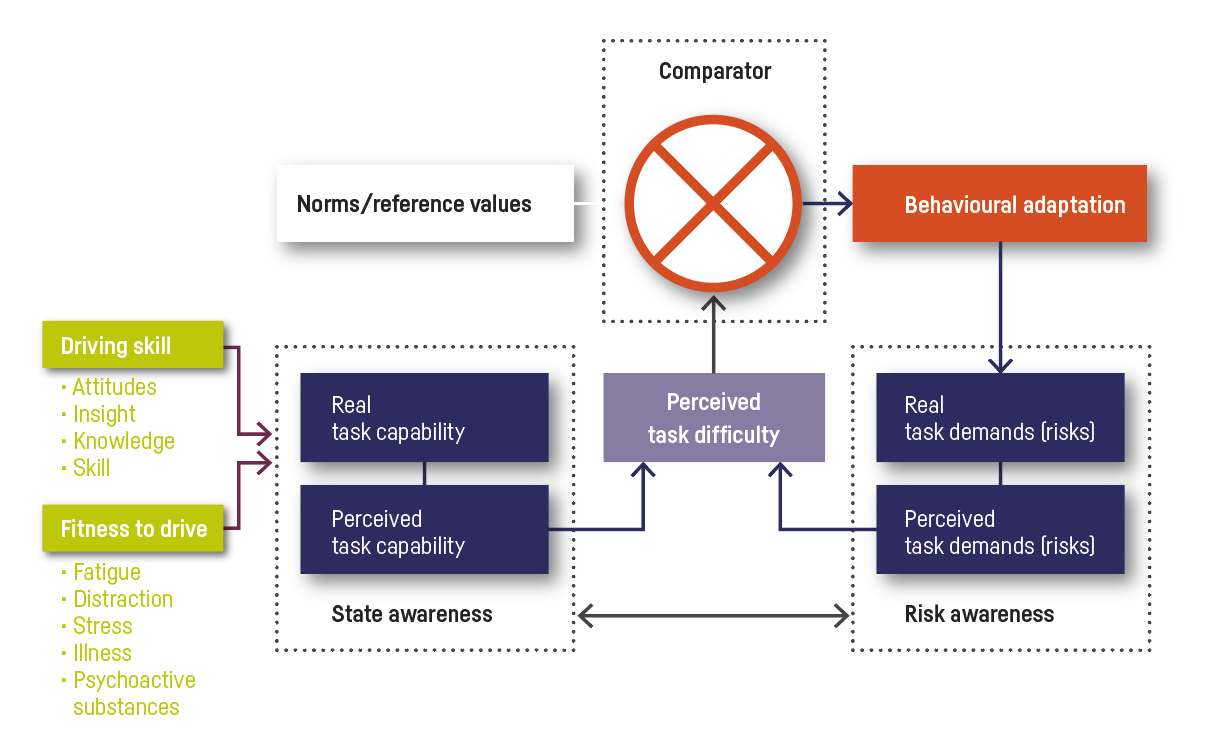 Figure 2. Schematic representation of the processes and factors that play a role in task capability of road users (see
Figure 2. Schematic representation of the processes and factors that play a role in task capability of road users (see 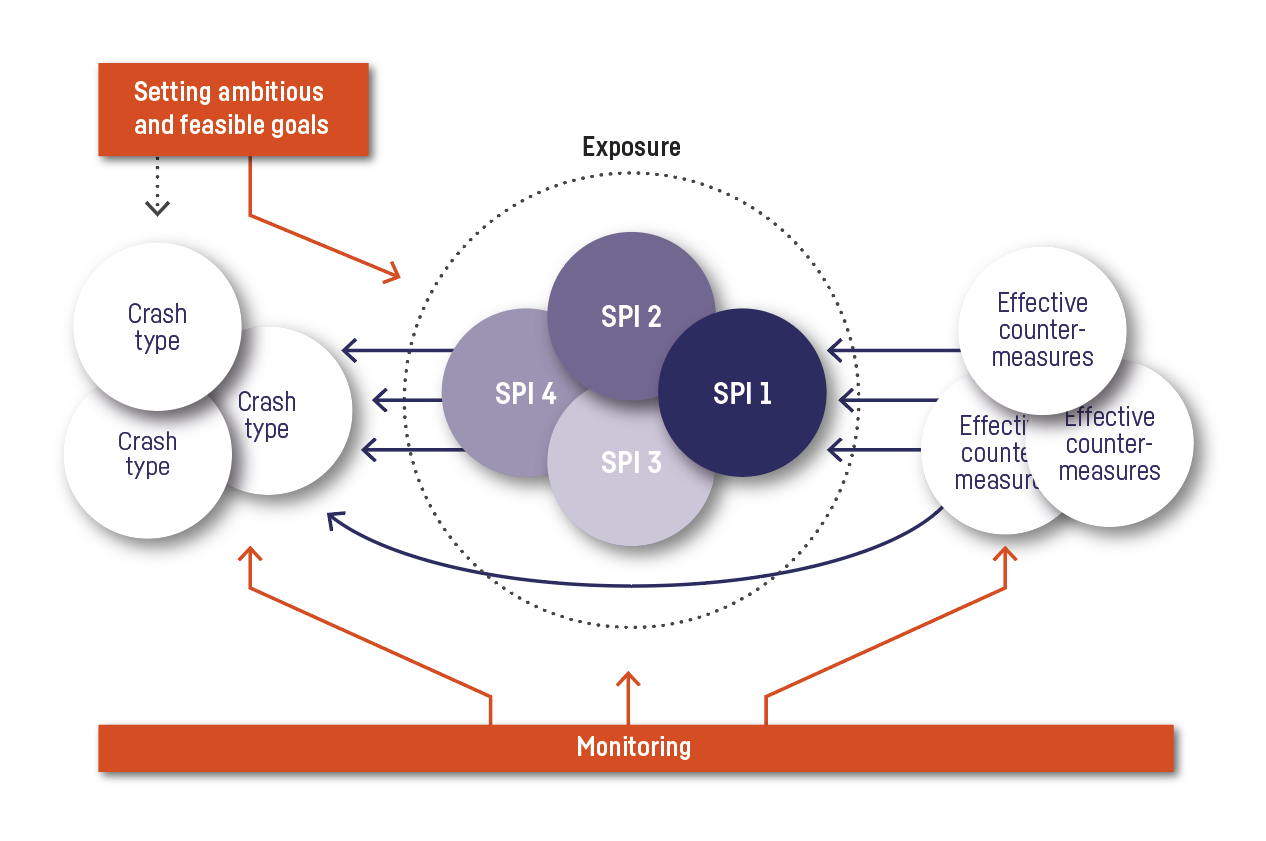 Figure 3. Relationship between crashes, risk factors (SPIs) and countermeasures and the connecting activities necessary to contribute to a sustainably safe traffic system: setting aims, taking countermeasures and monitoring (see also the
Figure 3. Relationship between crashes, risk factors (SPIs) and countermeasures and the connecting activities necessary to contribute to a sustainably safe traffic system: setting aims, taking countermeasures and monitoring (see also the 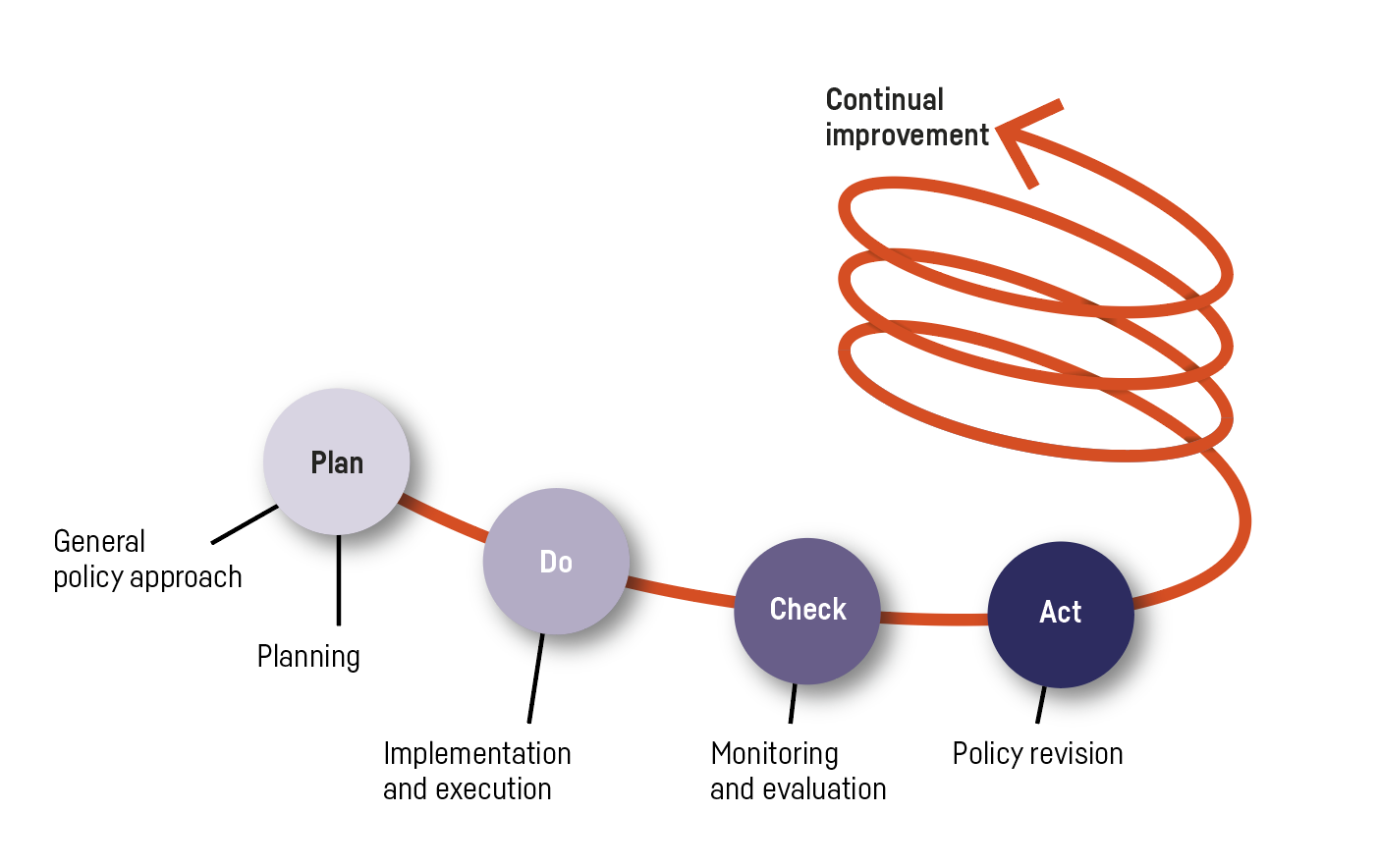 Figure 4. Plan-Do-Check-Act quality cycle (after
Figure 4. Plan-Do-Check-Act quality cycle (after 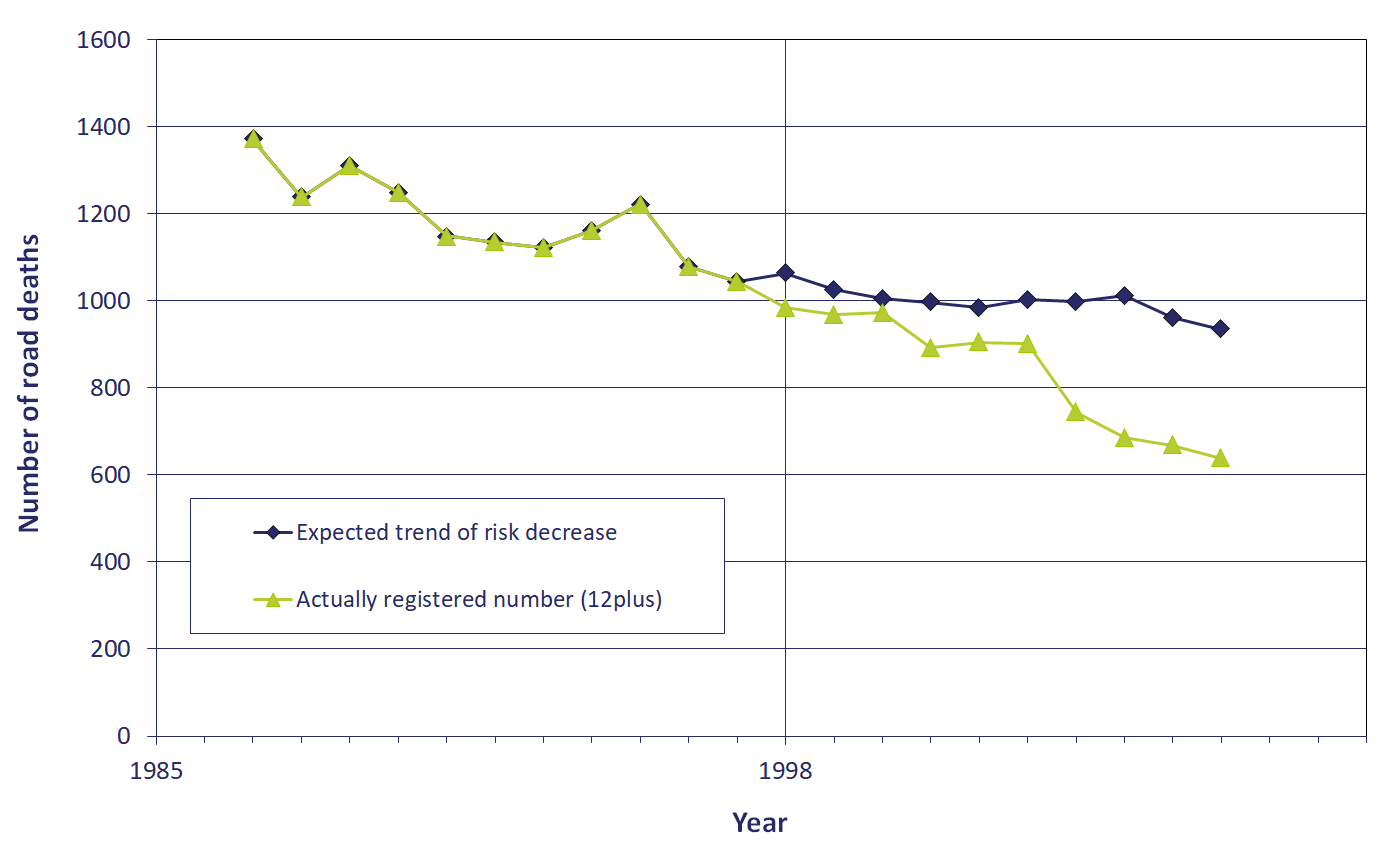 Figure 5. Development in registered number of road deaths (in population over 12 years of age) in relation to the expected trend had the existing policy been continued (so without Sustainable Safety)
Figure 5. Development in registered number of road deaths (in population over 12 years of age) in relation to the expected trend had the existing policy been continued (so without Sustainable Safety) 
